Say
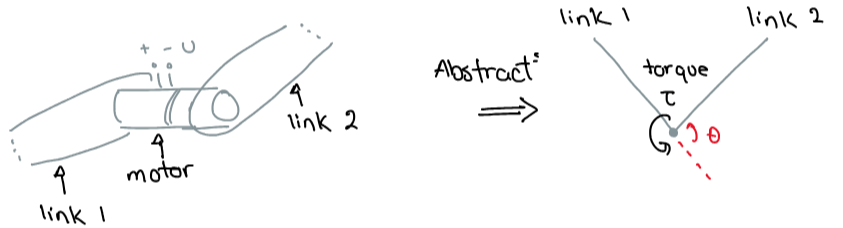
- Voltage - Torque - Angle of link 2 relative to link 1 is the desired angle
Goal
What is
Modelling
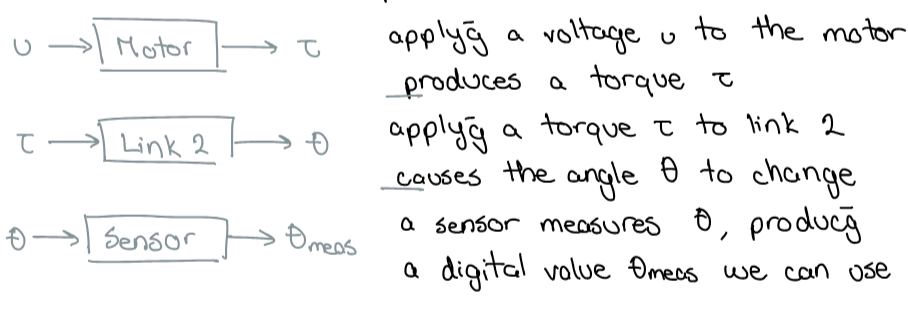
- We use a sensor to determine
- This block diagram model is called a ‘plant’

We want to compare

So we can redefine our goal as:
*Design the controller to map (algorithm):
The objective of the course is to convert desirable system behavior into mathematical conditions and implementable algorithms
Main Steps in the Control Design Process
- Construct a mathematical model suitable to control design (1st half of the course)
- Define verifiable specifications (transient and steady-state) (1st half of the course)
- Analyze and evaluate stability of the closed-loop system (CLS) (2nd half of the course)
- Design the controller (2nd half of the course)
- Simulate and tune parameters (Labs)
- Implement in practice (Labs)