Example 1: Cruise Control of a Car
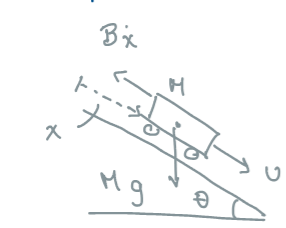
- Force imparted by the engine - Mass of the car - Friction - Slope incline
Governing Equation
Say we want to obtain a certain speed
 Note that
Note that
Example 2: Voltage Control of an RLC Circuit
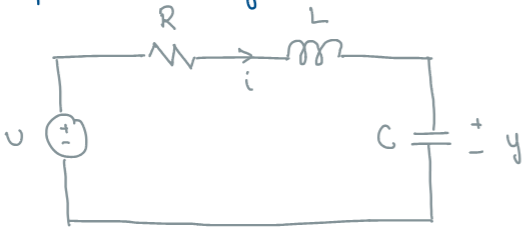
input (voltage) output (capacitor voltage)
Substituting
State-space Model
State Vector
Now we write eq. 1 and 2 in matrix form solving for the derivatives

Example 3: Inverted Pendulum
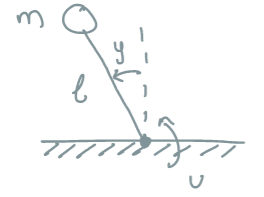
- Point mass - Length of massless rod - Angle of pendulum from vertical - Torque applied at the pivot
Governing Equation
The specifics of the governing equation isn’t the focus of the course
State-space Model
Example 4: DC Motor
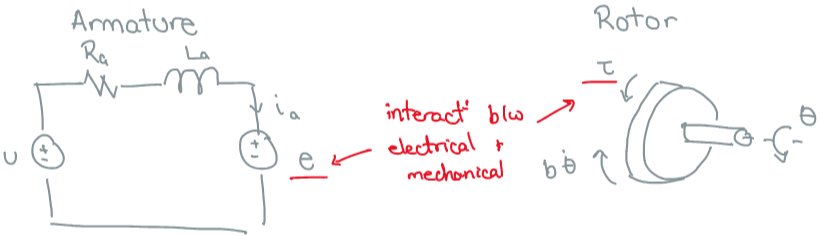
- Back emf; voltage induced from movement of armature coils in magnetic field - Friction - Torque produced by current in coils and magnetic field of magnets - Moment of inertia - Input voltage - Back EMF Constant, - Torque constant,
The Way I like to think of making State-Space Models
- List all of the variables
- Remove the constants
- Take an integral of remaining constants (e.g. if we have
, then we’re left with ) - Remove the constants again
- What you’re left with are variables of the state-space model